每家公司都有一个特定的技术架构,其中集合了硬件组件(输送机、货架、码垛机等)、软件(WMS、ERP 等)、人工操作(按钮)或高级导航过程,该过程集成了在特定协议下运行的可编程逻辑控制器(modbus、profinet、profibus……)。
机器人解决方案可以使用 IT 接口、附加设备或机器人编码智能集成到现有架构中。
可检索任务命令,并通过下列方式将其发送到机器人车队管理系统:




每家公司都有一个特定的技术架构,其中集合了硬件组件(输送机、货架、码垛机等)、软件(WMS、ERP 等)、人工操作(按钮)或高级导航过程,该过程集成了在特定协议下运行的可编程逻辑控制器(modbus、profinet、profibus……)。
机器人解决方案可以使用 IT 接口、附加设备或机器人编码智能集成到现有架构中。
可检索任务命令,并通过下列方式将其发送到机器人车队管理系统:
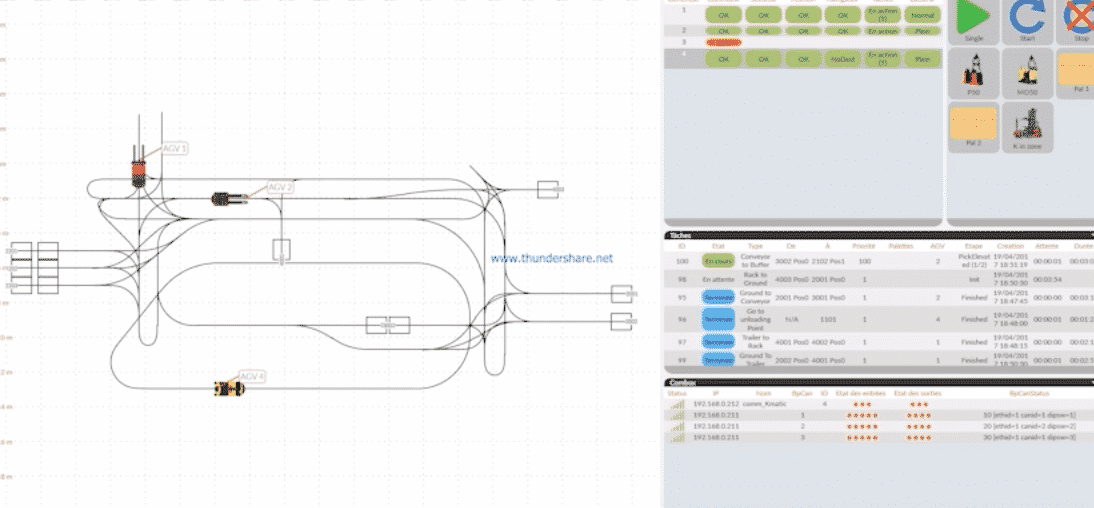
移动机器人车队管理器必须监督设备状态,指派任务,并组织交通。
因为这些输入信息实现了集中控制,机器人管理器可根据实时事件采取措施,并切换操作。
我们的系统可以根据距离、电池电量等因素,为对口任务自动选择适用的机器人。
而且,Driven by BALYO 机器人管理器还可以根据特定需求来做任务规划,并根据触发器严重程度来区分任务优先级。
客户可以指挥任务规划,或让 ERP/WMS 来认定应当首先执行哪个任务。
交通管理是 Balyo 技术的一个重要环节,它提升了整个系统的智能度。
机器人管理器会实时监控机器人网络、授权或阻止机器人行进,避免堵塞和安全运输。
它会控制回路中每辆自主导航车辆的移动,并且可以根据机器人的实效尺寸和其他移动机器人的位置,让机器人停留在特定区域。
机器人管理器发挥着交通控制器的作用,可以指挥机器人根据安装需要在回路上移动,避免死锁。