![]()
ERP/WMS
当社のロボットマネージャーと連携し、メッセージ(ステータス、ミッション命令)の送受信を行う
![]()
センサーとPLCネットワーク
インフラや機械にパレットセンサーを追加し、積載状況を報告する
![]()
人間の介入
ボタンを押す、またはロボットマネージャーのインターフェースやロボットのHMI上でミッションを直接起動する
![]()
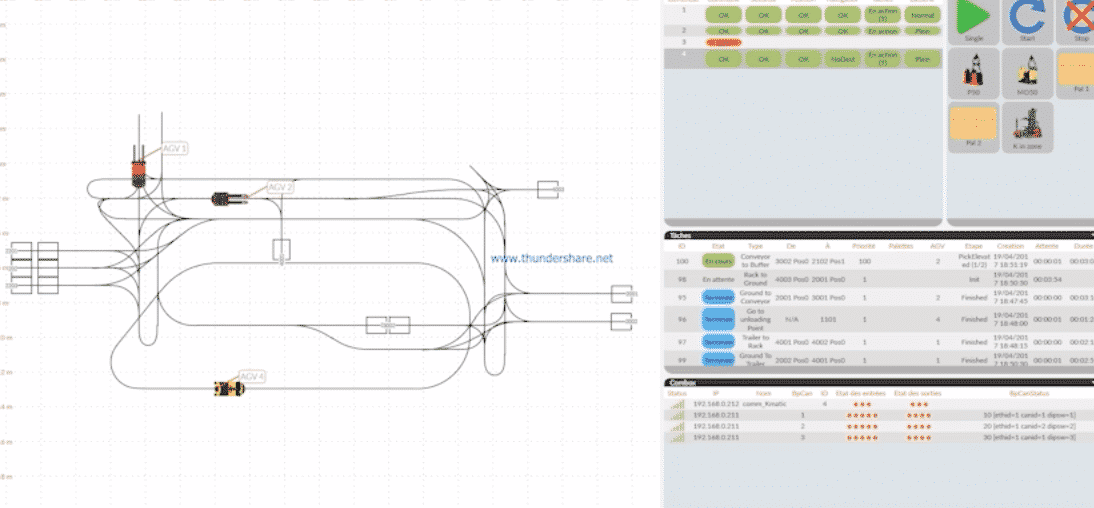
タスクシーケンス
ロボットの前面安全レーザーを使用して床上の保管エリアをスキャンし、パレットを降ろせる空きスペースを検出する

![]()
ERP/WMS
当社のロボットマネージャーと連携し、メッセージ(ステータス、ミッション命令)の送受信を行う
![]()
センサーとPLCネットワーク
インフラや機械にパレットセンサーを追加し、積載状況を報告する
![]()
人間の介入
ボタンを押す、またはロボットマネージャーのインターフェースやロボットのHMI上でミッションを直接起動する
![]()
タスクシーケンス
ロボットの前面安全レーザーを使用して床上の保管エリアをスキャンし、パレットを降ろせる空きスペースを検出する