利用安装工具可以构建一张供自动导航叉车使用的参考地图,让我们的机器人了解您的环境布局。
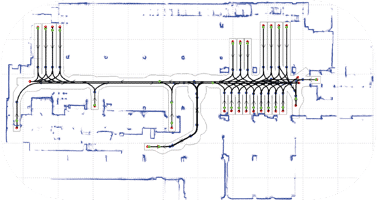
这份参考地图通过记录工厂的每一个结构(如墙壁、货架、柱子和机器)构建而成。
这个过程完成后,机器人会将参考地图记录在存储器中。
当机器人移动时,它会对周围的环境进行 360 度扫描,实时关联它所发现(使用 LIDAR)和所了解(参考地图)的一切,并实现精确自定位(SLAM)。
BALYO 算法非常强大,足以在基础设施发展日新月异的苛刻环境中运行,它使用了一组适应性功能,比如先进的多网络接入点 LIDAR、相对感知智能和视觉设备。