A BALYO design algorithm for material handling needs
A BALYO design algorithm for material handling needs
Environment learning is a vital stage of robot life. 10 years ago, BALYO developed the most advanced algorithm for mobile robotics based on Simultaneous Localization and Mapping (SLAM), allowing manual material handling products to become real autonomous vehicles.
Combining latest LIDAR (Light Detection and Ranging) technologies with its proprietary algorithm, BALYO retrieves information from robot surroundings and computes thousands of positions to self-localize precisely, without adding additional infrastructures to customers environment; no reflector, no wire, no tape, nothing but the robot’s eyes and brain.
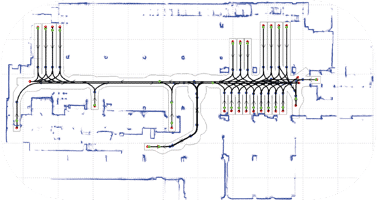
Thanks to our installation tools, we can teach your environment layout to our robots, by building a map that will be used by the autonomous forklift as a reference. This reference map is built by recording every structural element of your facility such as walls, racks, columns and machines. This process completed, the reference map is recorded in robot’s memory. While the robot is moving, it performs a 360° scan of its environment, correlating in real time what it sees (using LIDAR) to what it knows (the reference map), and localizing itself accurately (SLAM).
The BALYO algorithm is robust enough to operate in a difficult environment where infrastructure is evolving, using an adapted set of features such as advanced multinap LIDAR, relative perception intelligence and vision equipment.
02
MOVING
One brain path generation
One brain path generation
Just like autonomous cars, we provide you with the driver, this time for real. Just like the human brain, the Driven by BALYO technology sends commands to the robot to coordinate all its movements, forward, stop, reverse, turn, lift or lower the forks. Our technology delivers a specific navigation and mission coding toolbox which enables the generation of specific sets of movements, emulating a real driver behavior.
Our autonomous robots are restricted to pre-set navigation zones, built in line with customer environment and its operational needs. The subsequently generated paths gives the capability to circulate from any point to any destination, combined to robot controled intelligence, providing the skills to execute dedicated tasks
03
SAFETY
A safe design for a safe navigation
A safe design for a safe navigation
One of the major challenges of mobile robotics is to guarantee a maximum level of safety, while ensuring very high productivity. Driven by BALYO technology incorporates one of the most advanced safety systems on the market, guaranteeing protection for people, machines and products at all times.
SAFETY Our vehicles are engineered against specific safety grades and using standards such as ANSI B56.5 or EN1525. Operating in a human compatible environment implies a set of sensors (PLd) and complex logics of safety, triggered by speeds, tasks, and redundant software inputs.
Our team know-how in component integration and algorithm design provides a 360°Safety for your robots allowing a safe robotic environment:
>
People production, machines & goods
>
Incidents decrease
>
Quality improvement
>
Reduction of breakdowns
04
DETECTION
No obstacles, only safe operations
No obstacles, only safe operations
BALYO technology enables the robot to analyze patterns, forms, detect a human, a location, a pallet, a free space using 2D and 3D sensors… Operating in a mixed environment requires obstacle detection guarantee, whatever the height and form.
BALYO is re-inventing the way detection works, introducing a new generation of robots capable of using safety laser or data to create a virtual software barrier. Static and dynamic obstacle detection features prevent breakdowns and unnecessary safety hold-ups. The projection of detection fields on the robot path provides advanced protection, adapted to the robot trajectory and permits smooth navigation.
THINKING OF A ROBOTIC PROJECT?
Contact us and check your project feasibility today!